Willkommen zu unserem Newsletter. In dieser Ausgabe zeigen wir Ihnen die Möglichkeiten, die vierte Achse zum Antrieb eines Spreizgreifers zu verwenden. In den nächsten Ausgaben wierden wir neue Themen aufgreifen. Wir freuen uns auf Ihre Rückmeldungen , um Sie interessierende Themen aufzugreifen.
Aktuierung von Spreizgreifer mit der vierten Achse
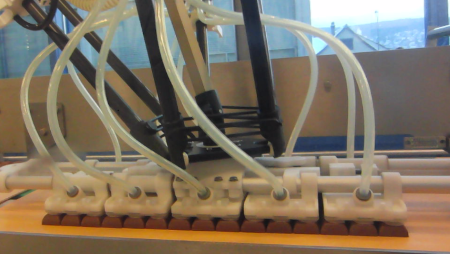
Bei der Kinematik des Delta Roboters ist die Translation komplett unabhängig von der Rotation. Die Hauptarme bewegen Produkte translatorisch von A nach B, während die vierte Achse in der Regel die drehende Bewegung um die Hochachse bewerkstelligt. Da die vierte Achse komplett unabhängig ist, kann sie entfernt werden, sofern keine Rotation der Produkte benötigt wird (3-Achs Version). Es ist aber auch möglich, die vierte Achse für andere Bewegungen einzusetzen. Eine häufige und oft sehr hilfreiche alternative Verwendung ist die Aktuierung eines Spreizgreifers. Über Zahnriemen oder Ritzel-Zahnstange wird die Rotation in eine Translation umgelenkt, um den Abstand zwei gegriffenen Produkten zu verändern.
Der klassische Ansatz für solche Anwendungen ist die Verwendung von pneumatischen Zylindern. Der wichtigste Nachteil der Pneumatik ist die fehlende Kontrolle über den Bewegungsablauf. Ein sanfter Bewegungsablauf muss mit einer geringeren Geschwindigkeit erkauft werden. Selbst bei Verwendung von Dämpfern lässt sich in der Regel ein Schlag auf die Roboterstruktur und das Produkt am Ende der Bewegung nicht komplett verhindern.
Im Gegensatz dazu erlaubt der Einsatz des Servomotors der vierten Achse eine ruckbegrenzte* Bewegung mit definiert einstellbaren Beschleunigungen und Verzögerungen. Somit lassen sich die Produkte viel sanfter handhaben. Es können auch Formatumstellungen ohne Teilewechsel parametriert werden, was die Lösung robust und flexibel macht.
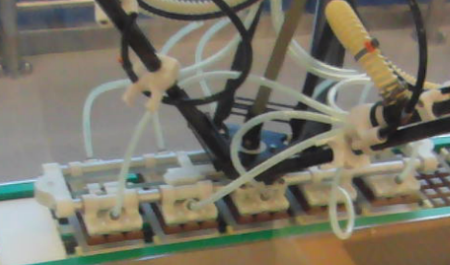
Wie alle Lösungen hat auch diese Nachteile. Für einfache Gruppieraufgaben mit bloss zwei fixen Positionen ist die Einfachheit und Wirtschaftlichkeit einer pneumatischen Lösung kaum schlagbar. Der Vorteil der sanften Bewegung hat den Nachteil, dass mehr Teile konstruiert und ausgelegt werden müssen. Besonderes Augenmerk muss auf die Lagerungen gelegt werden. Unter dynamischer Last wird sich ein Spreizgreifer deformieren. Eine sorgfältige Analyse der Freiheitsgrade stellt sicher, dass sich dabei keine Lagerungen verklemmen. In komplexeren Aufgabenstellungen mit Formatabhängigen Verfahrwegen und mehreren Schlitten überwiegen somit die Vorteile der Nutzung des Servomotors die Nachteile bei weitem.
Über VELTRU
VELTRU beliefert Maschinen- und Anlagenbauer mit Komponenten und Logistiksoftware für Pick-and-Place Applikationen. Wir bieten Delta Roboter, Soft-SPS Steuerung, Unterstützung für Bildverarbeitung und Applikationen für Roboterstrassen an. Wir unterstützen unsere Kunden mit Schulungen, Entwicklungsdienstleistungen und direkter Projektarbeit, ganz nach ihrem Wunsch. Unser Application Template erlaubt es, Standardanwendungen zu konfigurieren, aber auch jederzeit zusätzliche, projektspezifische Funktionalität zu programmieren.